ę╗Īó╣”─▄├Ķ╩÷
EL-AIcarūįäė±{±é╦ŃĘ©Ėé┘ÉŲĮ┼_╩Ūšµš²Ą─ųŪ─▄▄ć╗“╩Ū▌å╩ĮÖCŲ„╚╦Ż¼╦³į┌é„ĮyųŪ─▄▄ćĄ─╗∙ĄA╔Ž═©▀^┤Ņ▌d╣”─▄ÅŖ┤¾Ą─ī¦║Įėŗ╦ŃÖCŻ¼ė╔ī¦║Įėŗ╦ŃÖC▀BĮė╔ŅČ╚özŽ±ÖCüĒīŹ¼F╚╦Ą─ļpč█╣”─▄Ż¼ė╔ī¦║Įėŗ╦ŃÖC▀BĮėĄ─╝ż╣Ō└ū▀_ī”ł÷Š░Æ▀├Ķ▓ó═©▀^▄ø╝■Į©─ŻüĒ┼ąČ©šŽĄK╬’╬╗ų├Å─Č°īŹ¼Fūįų„ī¦║ĮĪŻ
ī¦║Įėŗ╦ŃÖC╩Ūęįubuntu×ķ▓┘ū„ŽĄĮyŻ¼▓óį┌Ųõ╔ŽĄ─▀\ąąÖCŲ„╚╦Ą─ROSŽĄĮyŻ¼įōROSŽĄĮy┐╔ÆņĮėÖCŲ„╚╦Į©─Ż▄ø╝■üĒĘ┬šµįOėŗĖ„ŅÉÖCŲ„╚╦Ż¼ę▓┐╔ÆņĮėĘ┬šµ▄ø╝■üĒ“×ūCŽÓĻPūRäe╦ŃĘ©╗“┐žųŲ╦ŃĘ©Å─Č°▌^×ķų▒ė^Ąž┐┤ĄĮÖCŲ„╚╦─ŻöMĄ─▀\ąąĀŅæBŻ¼×ķšµīŹÖCŲ„╚╦Ą─įOėŗ┼c┐žųŲ╠ß╣®═ĻéõĄ─└Ēšō╗∙ĄAĪŻ═¼ĢrROSŽĄĮy▀Ć┐╔ęį┼cOPENCVĪóTensorFlowĄ╚ęĢŅlłDŽ±ūRäe▄ø╝■▀MąąöĄō■Į╗╗źŻ¼īóŲõAIĄ─ęĢėX╣”─▄░lō]ĄĮśOų┬ĪŻ
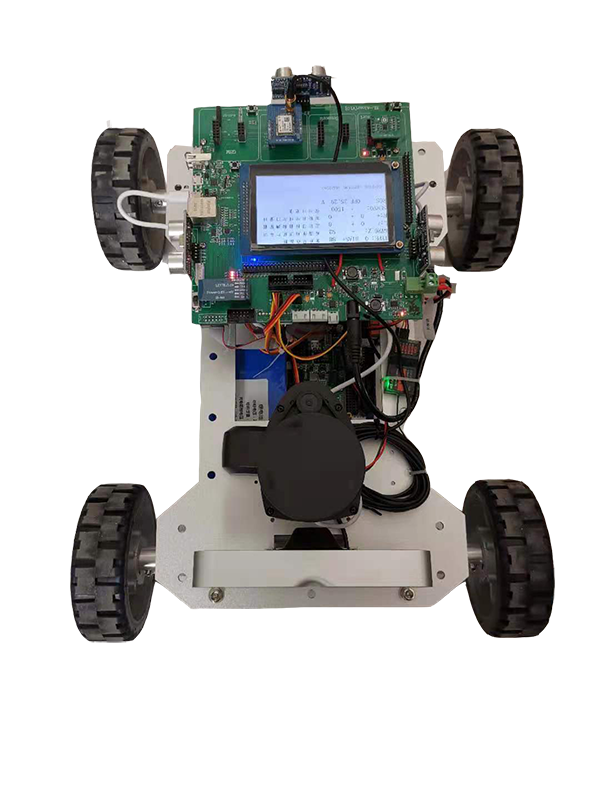
▄ć¾w┐žųŲå╬į¬▓┐Ęų▓╔ė├╗∙ė┌ARM Cortex-M4 ā╚║╦Ą─STM32F407╠Ä└ĒŲ„Ż¼ų„ę¬═Ļ│╔ļŖį┤╣▄└ĒĪóļŖÖC┐žųŲ╝░£y╦┘Īó╝t═Ō╗“│¼╔·▓©▒▄šŽĪóIMUū╦æBĮŌ╦Ń╝░GPSČ©╬╗╣”─▄ĪŻ▄ć¾w┐žųŲå╬į¬═©▀^ŽÓæ¬Įė┐┌┼cū÷AI┐žųŲĄ─ī¦║Įėŗ╦ŃÖCŽÓ▀BŻ¼īŹ¼Fī¦║Į╦∙ė├öĄō■╔Žé„╝░Įė╩šī¦║Įėŗ╦ŃÖC┐žųŲųĖ┴ŅĪŻ═¼Ģrę²│÷407╦∙ėąĄ─GPIOę²─_ĄĮ┼┼ßśŻ¼ĘĮ▒Ńė├æ¶DIYĪŻ
Č■ĪóŽĄĮyĮYśŗ
¤o╚╦±{±éĖé┘ÉŲĮ┼_┐╔Ęų×ķ╩ęā╚Ėé┘ÉŲĮ┼_┼c╩ę═ŌĖé┘ÉŲĮ┼_Ż¼╩ęā╚ŲĮ┼_▓╔ė├ėóéź▀_Jetson nanoĦGPUĄ─4║╦A57╠Ä└ĒŲ„Ż¼┐╔ūįąą╝ėčbšZę¶┐žųŲå╬į¬▀Mąą┐žųŲĪŻ▓╔ė├šµīŹĄ─╦─▌åļŖäė┤·▓Į▄ćŲĮ┼_Ż¼┤Ņ▌dĖ▀ąį─▄ėŗ╦ŃÖCĪóĖ▀╦┘╝ż╣Ō└ū▀_┼cGPSå╬į¬ĪŻ
|

 Š®╣½ŠW░▓éõ11010802044402
Š®ICPéõ18040446╠¢-1 ŠWšŠįOėŗŠSūoŻ║▒▒Š®Š½āx▀_╩ó┐Ų╝╝ėąŽ▐╣½╦Š
Š®╣½ŠW░▓éõ11010802044402
Š®ICPéõ18040446╠¢-1 ŠWšŠįOėŗŠSūoŻ║▒▒Š®Š½āx▀_╩ó┐Ų╝╝ėąŽ▐╣½╦Š
